您现在的位置是:主页 > news > 江苏高效网站制作机构/郑州seo关键词自然排名工具
江苏高效网站制作机构/郑州seo关键词自然排名工具
![]() admin2025/4/30 7:27:33【news】
admin2025/4/30 7:27:33【news】
简介江苏高效网站制作机构,郑州seo关键词自然排名工具,网站建设中网站需求分析报告内容,广西建设网官网培训中心笔者上一篇文章介绍了一种轮式移动机器人的建模仿真,链接如下:kongzhang:[ROS学习1]移动机器人建模仿真zhuanlan.zhihu.com这篇文章主要介绍ROS与Gazebo联合仿真下,控制移动机器人运动的三种方式,分别是终端、Python…
笔者上一篇文章介绍了一种轮式移动机器人的建模仿真,链接如下:
kongzhang:[ROS学习1]移动机器人建模仿真zhuanlan.zhihu.com
这篇文章主要介绍ROS与Gazebo联合仿真下,控制移动机器人运动的三种方式,分别是终端、Python和C++。以上一篇文章中所建立的模型为基础。
1. 终端
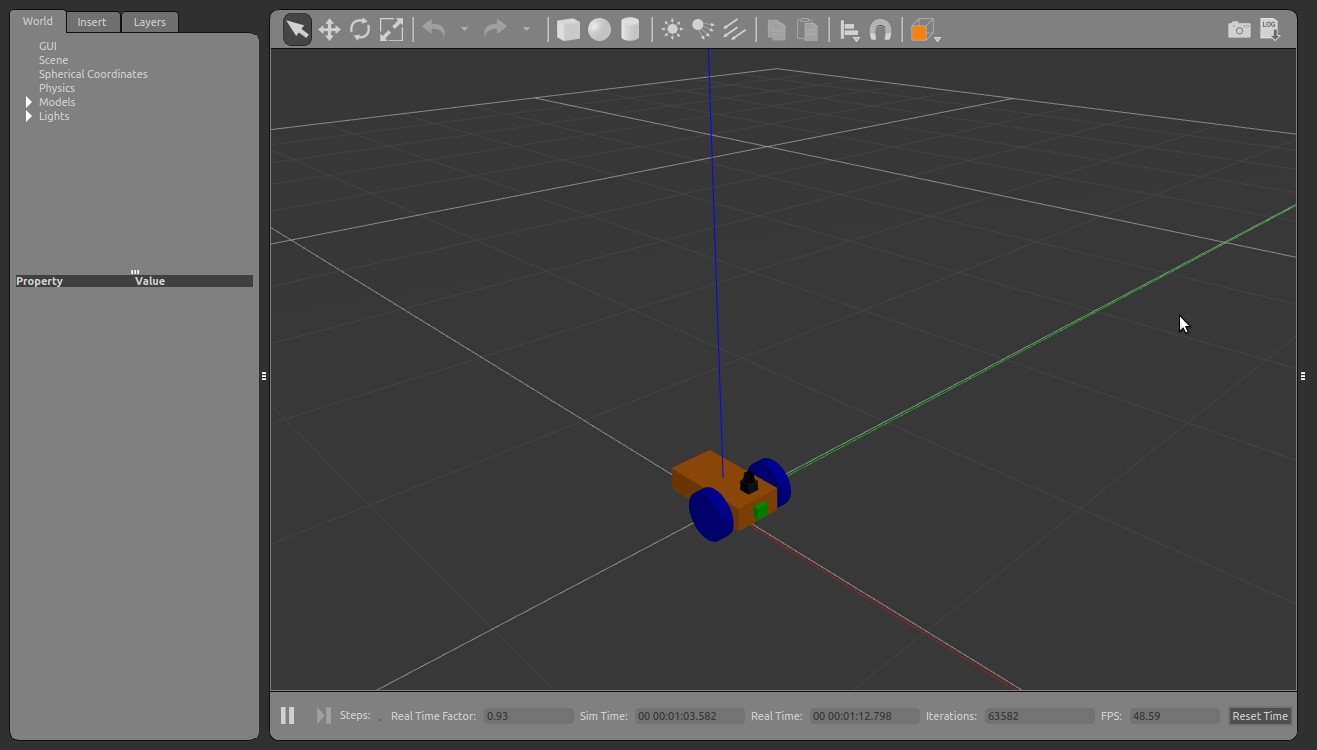
通过终端向对应的话题下发送消息实现移动机器人的运动。这个对应话题是建立机器人模型时运动插件的话题。就拿上一篇文章中的模型举个例子吧,所用到的运动插件是Gazebo中自带的轮式差分驱动插件。
<plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so">
<legacyMode>false</legacyMode>
<alwaysOn>true</alwaysOn>
<updateRate>20</updateRate>
<leftJoint>left_wheel_hinge</leftJoint>
<rightJoint>right_wheel_hinge</rightJoint>
<wheelSeparation>0.4</wheelSeparation>
<wheelDiameter>0.1</wheelDiameter>
<torque>20</torque><commandTopic>mybot/cmd_vel</commandTopic>
<odometryTopic>odom</odometryTopic>
<odometryFrame>odom</odometryFrame>
<robotBaseFrame>chassis</robotBaseFrame>
</plugin>
上面加粗部分就是这个插件的命令话题,这个话题命令规则没有限制,根据个人喜好。Gazebo中的节点订阅这个命令话题,根据所获得的消息数据去去控制移动机器人相应的运动。
通过终端控制机器人运动,主要是用到了rostopic中的命令,
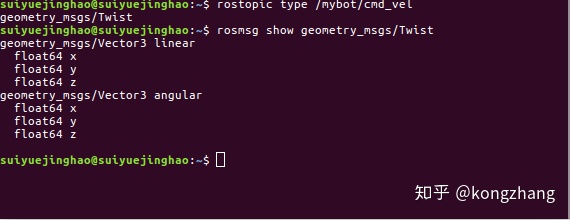
rostopic pub /命令话题 /话题格式 “依据话题格式给相应变量赋值”因为笔者所用到的模型是上一篇文章的模型,所以 /命令话题 就是 mycar/cmd_vel,/话题格式 (就是你的消息格式) 就是 geometry_msgs/Twist(差分驱动用到的消息格式),“依据话题格式给相应变量赋值”首先要知道这个消息中有哪些变量。geometry_msgs/Twist消息的数据如下所示:
geometry_msgs/Vector3 linear float64 x float64 y float64 z
geometry_msgs/Vector3 angularfloat64 xfloat64 yfloat64 z如果对某一话题上的消息格式不清楚 ,可以采用下面图片中的方式查询消息格式。
可以看到这个消息格式由三轴的线速度和角速度组成。我们想让小车沿x轴正方向运动,则“依据话题格式给相应变量赋值”就应该是
"linear: x: 0.1 //值的大小代表着速度的快慢 y: 0.0 z: 0.0angular: x: 0.0 y: 0.0 z: 0.0"
最终的命令就是:
rostopic pub /mybot/cmd_vel geometry_msgs/Twist "linear:x: 0.1y: 0.0z: 0.0
angular:x: 0.0y: 0.0z: 0.0" 
2.Python
主要是通过Python语言实现向话题发送消息。其实它的思想和前一节终端是一样的,只是通过Python语言加以描述。以下是具体代码,在代码中实现移动机器人转圈运动。
import rospy
from geometry_msgs.msg import Twistclass Carcontrol:def __init__(self):self.command_pub = rospy.Publisher("/mybot/cmd_vel", Twist, queue_size=1000)self.rate_10 = rospy.Rate(10)self.car_cmd_vel = Twist()def setCommand(self, vel_x, vel_y, vel_z, ang_x, ang_y, ang_z):self.car_cmd_vel.linear.x = vel_xself.car_cmd_vel.linear.y = vel_yself.car_cmd_vel.linear.z = vel_zself.car_cmd_vel.angular.x = ang_xself.car_cmd_vel.angular.y = ang_yself.car_cmd_vel.angular.z = ang_zself.command_pub.publish(self.car_cmd_vel)self.rate_10.sleep()def moveRotation(self, x, z):self.setCommand(x, 0, 0, 0, 0, z)def main():rospy.init_node('carControl')carcontrol = Carcontrol()while (not rospy.is_shutdown()):carcontrol.moveRotation(0.2, 0.1)if __name__ == '__main__':main()
3. C++
这一节主要用到C++语言去写控制节点,代码如下:
#include "ros/ros.h"
#include "geometry_msgs/Twist.h"int main(int argc, char **argv)
{ros::init(argc, argv, "car_control");ros::NodeHandle n;ros::Publisher command_pub = n.advertise<geometry_msgs::Twist>("/mybot/cmd_vel", 1000);ros::Rate loop_rate(10);while (ros::ok()){geometry_msgs::Twist car_cmd_vel;car_cmd_vel.linear.x = 0.2;car_cmd_vel.linear.y = 0;car_cmd_vel.linear.z = 0;car_cmd_vel.angular.x = 0;car_cmd_vel.angular.y = 0;car_cmd_vel.angular.z = -0.5;command_pub.publish(car_cmd_vel);ros::spinOnce();loop_rate.sleep();}return 0;
}
在这里要说一下,运行Python和C++编写的节点方法是不同的。对于Python语言的节点每次修改不需要重新编译工作空间,只需要保存并在对应的文件夹路径下去运行就行了。而对于C++编写的节点必须要进行编译,之后用rosrun中对应的命令去运行节点。
如果有什么问题请多多指教!!!
后面打算结合摄像机图像处理做一些分享。








